Learn more about Robotics

KAIST研究人员推出Quatro++:利用地面分割实现LiDAR SLAM闭环的强大全局配准框架
韩国科学技术院的研究人员开发了Quatro++,这是一个强大的全局配准框架,解决了LiDAR SLAM中稀疏性和退化问题。该方法超越了...

UBC和本田公布了革命性的敏感机器人软传感器
在一项具有开创性意义的研究中,不列颠哥伦比亚大学(UBC)的研究人员与本田公司合作,开发出了一种智能、可拉伸且非常敏感的柔...

认识HITL-TAMP:利用自动化规划和人工控制的混合策略教授机器人复杂的操纵技能的新AI方法
通过观察人类演示教授机器人复杂的操作技能已经取得了有希望的结果。提供详尽的操作演示需要时间和人力成本,使得将该范式扩...

这篇AI论文提出了一种基于NeRF的测绘方法,可以在边缘计算机上实现更高质量的重建和实时能力
在这篇论文中,研究人员介绍了一种名为H2-Mapping的基于NeRF的映射方法,旨在解决实时应用(如机器人技术、增强现实/虚拟现实...

“迎接2023-24年度埃森哲学者奖获得者”
“麻省理工学院和埃森哲产业与技术融合倡议宣布2023-24年的研究生奖学金获得者”

低成本四足机器人能掌握跑酷吗?揭示了一种革命性的敏捷机器人运动学习系统
使机器人执行复杂的物理任务,比如在具有挑战性的环境中导航,一直以来都是机器人技术领域的一大难题。这个领域中最具挑战性...

“遇见PhysObjects:一个基于物体的数据集,包含36.9K个众包和417K个自动化的常见家用物品的物理概念标注”
在现实世界中,信息通常通过文本、图片或视频的组合来传达。为了有效地理解和与这些信息互动,人工智能系统必须能够处理两种...

机器人如何做出更好的决策?MIT和斯坦福研究人员推出了Diffusion-CCSP,用于先进的机器人推理和规划
选择连续值的能力(例如握持和物体放置),以满足复杂的几何和物理约束条件(如稳定性和避免碰撞),对于机器人操作规划至关...

用个人机器人使生活更友好
沙里法·阿尔戈维尼姆(Sharifa Alghowinem)是媒体实验室的研究科学家,致力于探索能够用英语和阿拉伯语解释情感的个人机器人...

麻省理工学院的研究人员开发出一种人工智能技术,使机器人能够利用整只手来制定复杂的操纵物体的计划
全身操纵是人类的优势,但是机器人的弱点。机器人将盒子和搬运者的手指、手臂或躯干之间的每个可能的接触点解释为独立的接触...

“语言对于机器人技能综合的奖励”
由于Google的研究科学家Wenhao Yu和Fei Xia发布 使最终用户能够与机器人进行互动教学以执行新任务是其成功融入实际应用的关键...
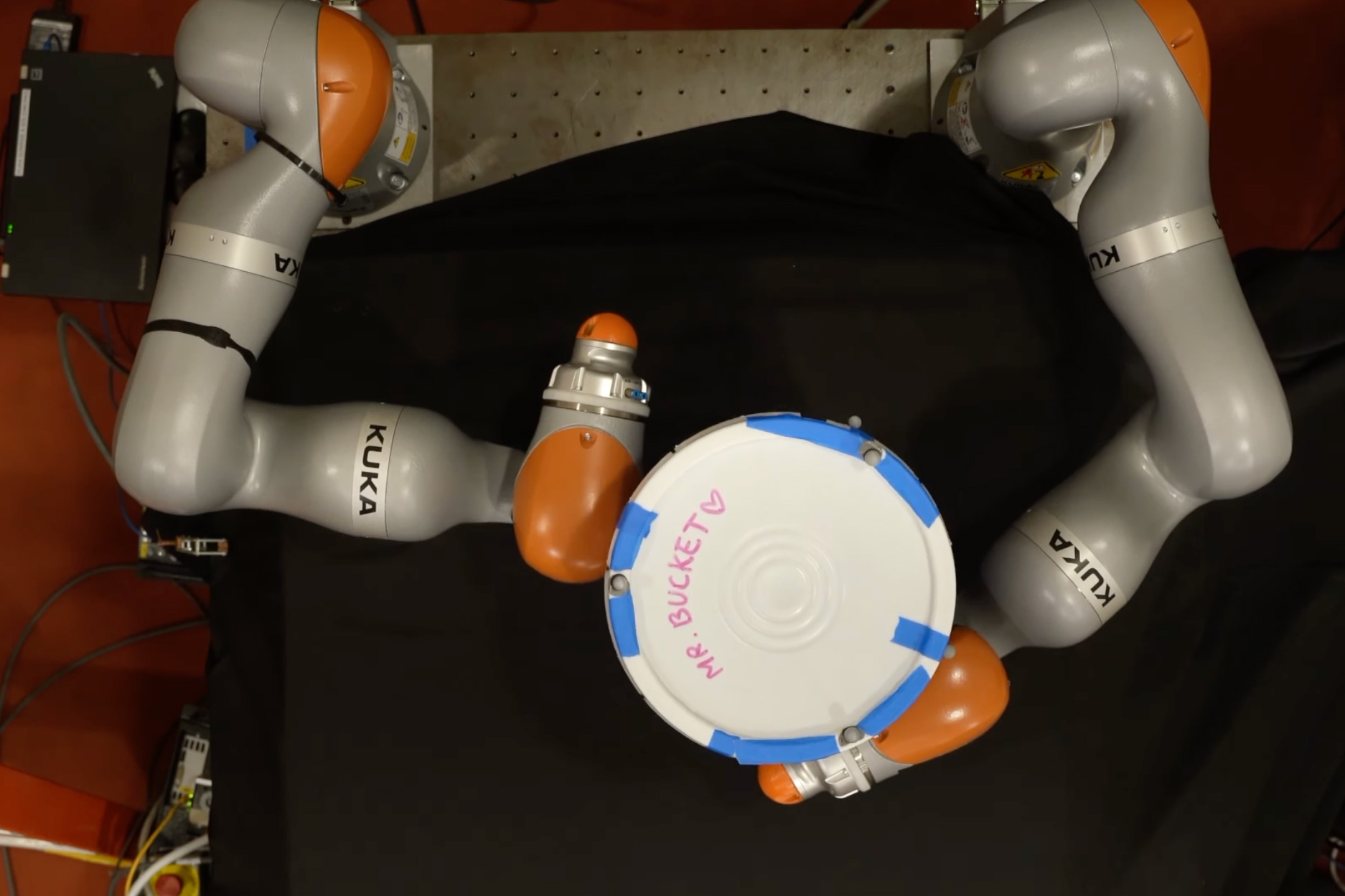
AI帮助机器人用全身来操作物体
通过一种新的技术,机器人可以高效地运用不仅仅是其指尖来推断移动物体

SMART成立研究小组,推进人工智能、自动化和未来工作的发展
人、手和机器(M3S)将为成功的人机合作设计技术、培训计划和机构

麻省理工学院和哈佛大学的研究人员提出了一种名为FAn的全面人工智能系统,它弥合了最先进的计算机视觉和机器人系统之间的差距,为分割、检测、跟踪和跟随任何物体提供了端到端的解决方案
在一项新的人工智能研究中,麻省理工学院和哈佛大学的研究人员引入了一种开创性的框架,名为“Follow Anything”(FAn)。该系...

CMU研究人员开发了一种简单的远程学习人工智能方法,将视觉先验知识转移到机器人任务中:相较于基准线,政策学习提高了20%
机器人学习进展的一个重要障碍是缺乏足够的大规模数据集。机器人学的数据集存在以下问题:(a) 难以扩展,(b) 在无菌、非真实...

“AIIMS德里开始研究医疗机器人、人工智能和无人机”
为了在不断发展的医疗保健领域保持领先地位,印度著名的全印度医学科学院(AIIMS)德里分院正为未来做准备。AIIMS正在以“Amri...

麻省理工学院和加州大学伯克利分校的研究人员引入了一个框架,使人类能够用最少的努力迅速教会机器人他们想要它做什么
与纽约大学和加州大学伯克利分校合作,麻省理工学院的研究人员开发出一种划时代的框架,使人类能够有效地教导机器人如何在家...

来自哥伦比亚大学和DeepMind的研究人员介绍了GPAT:一种基于Transformer的模型架构,通过推断每个部位的形状与目标形状相对应,准确预测部位姿态
通过视觉空间推理组装新物体的自主机器人系统具有广泛的实际应用潜力。尽管部件组装取得了显著进展,但现有方法仍限于预定义...
定义新技术中的公共利益
新的在线期刊旨在汇集麻省理工学院社区,讨论设计、实施和评估技术的个人社会责任

Barkour:用四足机器人进行动物级敏捷性基准测试
由Google研究科学家Ken Caluwaerts和Atil Iscen发布 创建表现出与动物或人类类似的强大且动态的运动能力的机器人一直是机器人...

- You may be interested
- AI中的爬山算法是什么?
- 边缘计算中的人工智能:实现算法以增强实时性
- 莱斯大学和印度理工学院坎普尔校区宣布合...
- 腾讯AI实验室引入了Chain-of-Noting(CoN...
- 突破界限:探索LLMs的函数调用
- 聚焦目标:将商业价值置于数据项目的核心位置
- 如何购买Solana(SOL)
- 🤖 让位给鳗鱼般的机器人:水下科技的突破 🌊
- 世界依赖着一个无人知晓的60年代码
- “如何在没有复杂算法的情况下提高预测指标...
- 互联网公司报告了史上最大规模的拒绝服务...
- NVIDIA CEO:创作者将通过生成式人工智能...
- 企业对生成式人工智能的采用
- 《机器学习高质量数据集建立初学者指南》
- Python:__init__不是构造函数:深入探究P...