英伟达通过Isaac AMR为移动机器人带来先进的自主功能
随着移动机器人的发货量激增以满足寻求运营效率的行业的不断增长需求,NVIDIA推出了一个新平台,以实现下一代自主移动机器人(AMR)车队。
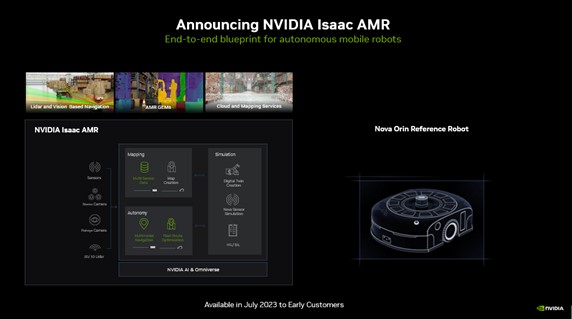
在台北的COMPUTEX技术会议上,NVIDIA创始人兼首席执行官Jensen Huang宣布,Isaac AMR将为早期客户提供高级映射、自主性和模拟。
Isaac AMR是一个平台,用于模拟、验证、部署、优化和管理自主移动机器人车队。它包括边缘到云的软件服务、计算和一组参考传感器和机器人硬件,以加速AMR的开发和部署,降低成本和上市时间。
根据ABI Research的预测,移动机器人的发货量预计从2023年的251,000台增加到2028年的1.6百万台,期间收入预测将从126亿美元增至645亿美元。
简化自主性的路径
尽管机器人的普及率飞速增长,但内部物流行业仍面临挑战。
传统上,用于自主导航的软件应用程序通常为每个机器人从头开始编写,使得在不同机器人之间推出自治变得复杂。此外,仓库、工厂和履行中心通常拥有超过100万平方英尺的巨大面积,使得它们难以为机器人绘制地图并保持更新。并将AMR集成到现有工作流程、车队管理和仓库管理系统中可能复杂。
对于那些从事先进机器人技术并寻求将传统叉车或自动导航车迁移到全自动移动机器人的人,Isaac AMR提供了加速迁移到全自主性的蓝图,降低成本并加速最先进AMRs的部署。
基于Orin的参考架构
Isaac AMR是建立在NVIDIA Nova Orin参考架构的基础上。
Nova Orin是Isaac AMR的大脑和眼睛。它集成了多个传感器,包括立体相机、鱼眼相机、2D和3D激光雷达,以及强大的NVIDIA Jetson AGX Orin系统级模块。参考机器人硬件配备有Nova Orin的预集成版本,使开发人员可以在自己的环境中评估Isaac AMR。
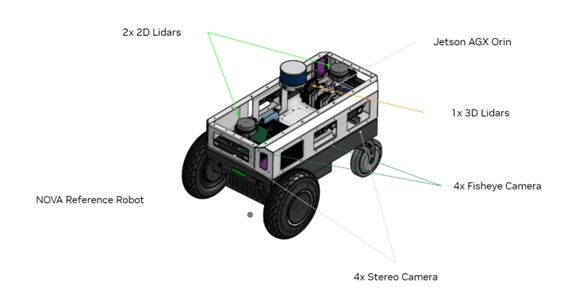
Nova的计算引擎是Orin,它提供了许多先进的AI和硬件加速算法,可以使用每秒275万亿次(TOPS)的边缘计算进行实时运行。
同步和校准的传感器套件提供传感器多样性和冗余性,用于实时3D感知和制图。用于记录、上传和重放的云原生工具可轻松进行调试、地图创建、培训和分析。
Isaac AMR:映射、自主性、模拟
Isaac AMR提供了映射、自主性和模拟的基础。
Isaac AMR通过与DeepMap的基于云的服务相结合,帮助加速机器人对大型设施进行映射和语义理解,从而将大型环境的机器人映射加速到数天内,提供厘米级精度,无需高技能技术团队。它可以生成丰富的3D体素地图,可用于创建多种类型AMR的占用地图和语义地图。

此外,Isaac AMR通过使用基于多模式导航的云端车队优化的NVIDIA cuOpt软件,缩短了在大型、高度动态和非结构化环境中开发和部署机器人的时间。
加速和模块化的框架实现了实时摄像机和激光雷达感知。使用先进的路径规划器、行为规划器和语义信息的规划和控制使机器人在复杂环境中自主操作。低代码、无代码界面使其易于快速开发和定制不同场景和用例的应用程序。

最后,Isaac AMR通过利用NVIDIA Omniverse提供的基于物理的模拟简化了机器人操作。这可以使数字孪生真正实现,从而可以在部署到物理世界之前为机器人应用程序进行开发、测试和定制。这显著降低了部署AMRs的操作成本和复杂性。

注册以获得 Isaac AMR 的早期访问权限。