“火星上的变形机器人:加州理工学院开发全地形机器人作为NASA任务的候选者”
Mars Transformers Caltech develops all-terrain robot as a candidate for NASA missions
2020年,学者Mory Gharib和Alireza Ramezani开始构思一个可以变形的机器人,现在这个机器人将会有机会参与NASA的火星探测任务,这可谓是超乎想象的。
加州理工学院(Caltech)推出了一款多才多艺的机器人,它可以飞行、驾驶、行走,并通过其多种技能的组合实现八种不同的运动方式。他们称之为多模态移动机器人(Multi-Modal Mobility Morphobot),简称为M4,它通过NVIDIA Jetson平台进行边缘人工智能和机器人技术的支持。
“我们想要实现的功能越来越多,”加州理工学院的航空学和生物启发式工程学教授Gharib说道。“当我们向设计团队提出这个想法时,起初他们都说‘不’。”
加州理工学院对其进行了最初的研究经费支持,NASA及其喷气推进实验室(JPL)为其下一个阶段提供了资金支持,并在去年夏天将东北大学的电气与计算机工程助理教授Ramezani作为JPL的教职研究员引入,以进一步开发该机器人。
据Gharib介绍,其M42版本目前正在NASA进行火星探测车的开发,并且得到了美国交通部的关注。
“在NASA,我们目前正在接受在降落时变形的测试,”他说。
自从最近在《自然·通讯》杂志上发表了一篇关于该机器人的论文后,Gharib表示自己收到了大量的提案。
“我们对它突然获得如此多的关注感到有些眩晕,”他说。“不同的组织想做不同的事情,纷纷前来找我们。”
灭火和搜救行动
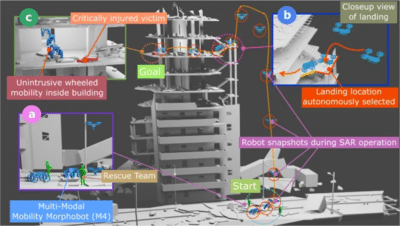
这篇论文的作者包括加州理工学院的Gharib和Ramezani,以及加州理工学院航空学的博士后研究员Eric Sihite、JPL的Arash Kalantari,以及CAST的设计工程师Reza Nemovi。他们表示,M4的设计目标是在搜救等多个领域满足各种任务需求。
例如,在无法通过滚动或步行进入区域(如火灾区域)时,它可以飞行并使用摄像头和传感器进行侦察,评估情况。
根据Gharib的说法,洛杉矶地区的多个消防部门已经联系他,对M4表达了兴趣。
“对于急救人员来说,这非常重要,因为你需要降落在一个安全的区域,然后驾驶进入事故现场,”他说。
多功能无人机交付完成任务
加州理工学院的团队还计划使用M4解决无人机交付的复杂问题。Gharib表示,对于这个机器人来说,无人机交付是“最容易实现”的目标。
他说,传统的无人机交付具有问题,因为出于安全原因,没有人希望无人机降落在他们的家或商业场所。而M4可以在远离人群的地方降落,然后驾驶完成交付任务,因此更安全。
M4还可以飞行到卡车无法进入或无法提供交付服务的区域。
“有很多地方卡车无法到达,”他说。
目前,M4的最高时速可以达到40英里,电池可以持续使用30分钟。但该团队正在努力设计更大的无人机,以实现更长的飞行时间、更大的载荷和更远的飞行距离。
天空是极限。
了解有关NVIDIA Jetson Nano的信息。